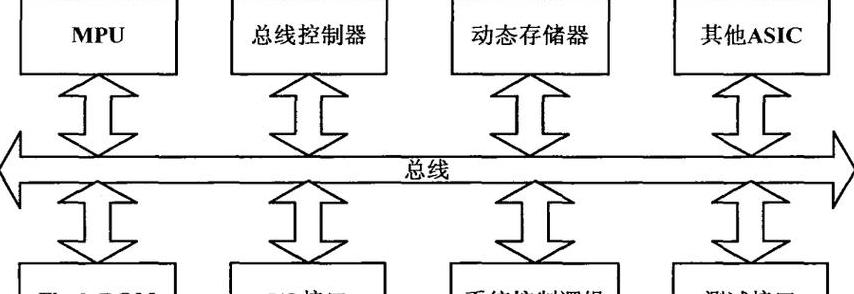
单片机的三总线指的是什么?
单片机控制系统的三个总线是指数据总线、地址总线和控制总线。
1.数据总线
单片机数据总线51为P0端口,CPU从P0端口发送和读回数据。
2.地址总线
51系列单片机的地址总线为16位。
为节省芯片引脚,采用P0口复用方式,除了作为数据总线工作外,在ALE信号时序匹配下,通过外部数据锁存器,P0口。
总线访问的前半个周期从P0口发送低8位地址,后半个周期从P0口发送8位数据。
高8位地址通过端口P2发送。
3.控制总线
51系列单片机控制总线包括读控制信号(RD)P3.7和写控制信号(WR)P3.6信号,以总线方式读取数据和写入数据。
这是微控制器的寻址。
寻址分为选线方式和译码方式。
译码方式分为全译码和部分译码。
行选法的优点是简单但非常浪费,全译码法可以最大限度地利用所有地址线,但电路非常复杂,需要几个与非门的配合。
。
一般来说,部分解码方法是最具成本效益的,特别是当连接存储芯片时,部分解码方法非常简单。
参考来源:百度百科-公交
SPI,I2C和UART三种串行总线协议的区别
第一个区别当然是名称:SPI(SerialPeripheralInterface:串行外设接口);I2C(INTERICBUS)UART(UniversalAsynchronousReceiverTransmitter:通用异步接收发送器)。其次,区别在于电信号线:SPI总线由3条信号线组成:串行时钟(SCLK)、串行数据输出(SDO)、串行数据输入(SDI)。
SPI总线可以将多个SPI设备相互连接。
提供SPI串行时钟的SPI设备为SPI主机或主设备(Master),其他设备为SPI从机或从设备(Slave)。
主从设备之间可以实现全双工通信。
当有多个从设备时,可以增加从设备选择线。
如果使用通用IO口来模拟SPI总线,则必须有一个输出端口(SDO)、一个输入端口(SDI),其他端口取决于实现的设备类型。
如果要实现主从设备,就需要一个输入输出端口。
,如果只实现主设备,则需要一个输出端口;如果只实现一个从设备,则需要一个输入端口。
I2C总线是一种双向、两线(SCL、SDA)、串行、多主接口标准,具有总线仲裁机制,非常适合设备之间的短距离、非重复数据通信。
在其协议体系中,传输数据时会携带目的设备的设备地址,从而实现设备联网。
如果用通用IO口来模拟I2C总线,实现双向传输,则需要输入输出口(SDA)和输出口(SCL)。
(注:我对I2C了解比较少,所以这里的描述可能不完整)UART总线是异步串口,所以它的结构一般比前两种同步串口复杂很多。
一般由波特率发生器(baudrategenerator)产生。
速率等于传输波特率的16倍),一个UART接收器,一个UART发送器。
硬件由两根线组成,一根用于发送,一根用于接收。
显然,如果用通用IO口来模拟UART总线,则需要1个输入口和1个输出口。
第三,从第二点可以明显看出,SPI和UART可以实现全双工,而I2C不能;第四,来看看专家的意见吧!wudanyu:I2C线数较少。
我认为它比UART和SPI功能更强大,但技术上也更麻烦,因为I2C需要双向IO支持,并且使用上拉电阻。
我认为抗干扰能力较弱,所以一般用于同一板上芯片之间的通信,很少用于远距离通信。
SPI实现更简单。
UART需要固定的波特率,这意味着两位数据之间的间隔必须相等,而SPI则无关紧要,因为它是时钟协议。
Quickmouse:I2C比SPI慢一点,协议比SPI复杂一点,但连接数比标准SPI少。
SPI接口简介(转贴)这几天接触到了使用SPI接口的flash,这才知道flash也可以串口。
看来我以前真是井底之蛙啊。
我找到了一些关于SPI接口的资料,但并不完整。
后来我找到了一些英文资料。
我翻译了一下,加上我个人的理解,做成了一篇文章。
希望对初学者有所帮助。
SPI接口的全称是“SerialPeripheralInterface”,意思是串行外设接口。
它首先由摩托罗拉在其MC68HCXX系列处理器上定义。
SPI接口主要用于EEPROM、FLASH、实时时钟、AD转换器、数字信号处理器和数字信号解码器之间。
SPI接口是同步串行数据传输CPU和外围低速设备之间。
在主设备的移位脉冲下,数据一位一位地传输,高位在前,低位在后。
它是全双工通信,整体数据传输速度比I2C总线要快,速度可以达到几个Mbps。
SPI接口工作在主从模式。
这种模式通常有一个主设备和一个或多个从设备。
其接口包括以下四个信号:(1)MOSI——主设备数据输出,从设备数据输入(2))MISO——主设备数据输入,从设备数据输出(3)SCLK——时钟信号,由主设备产生(4)/SS——从设备使能信号,由主设备控制在点对点通信中,SPI接口不需要寻址操作,并且是全双工通信,显得简单高效。
在具有多个从设备的系统中,每个从设备都需要独立的使能信号,硬件比I2C系统稍微复杂一些。
SPI接口的内部硬件实际上是两个简单的移位寄存器。
传输的数据为8位。
在从设备使能信号和主设备产生的移位脉冲的作用下,逐位传输,高位逐位传输,根据外设工作要求,其输出串行同步时钟的极性和相位可以配置,时钟极性(CPOL)对传输协议没有太大影响。
若CPOL=0,则串行同步时钟空闲状态为低电平;如果CPOL=1,则串行同步时钟空闲状态为高电平。
时钟相位(CPHA)可以配置为选择两种不同的传输协议之一进行数据传输。
如果CPHA=0,则在串行同步时钟的第一个跳变沿(上升沿或下降沿)采样数据;如果CPHA=1,则在串行同步时钟的第二个转换沿(上升沿或下降沿)采样数据。
采样。
SPI主模块和与其通信的外设的音频时钟相位和极性应保持一致。
SPI总线接口时序如图所示。
SPI功能模块的设计是基于SPI的功能定义和工作原理。
整个IPCore分为8个子模块:uC接口模块、时钟分频模块、发送数据FIFO模块、接收数据FIFO模块、状态机模块、发送数据逻辑模块。
、接收数据逻辑模块和中断模式模块。
深入分析SPI的四种传输协议可以发现,根据一种协议,只要转换串行同步时钟,就可以获得其余三种协议。
为了简化设计规范,如果要连续传输多个数据,则在两次数据传输之间插入串行时钟的空闲等待,使得状态机只需要两个状态(空闲和工作)即可正确工作。
转载自https://blog.csdn.net/kai_zone/post/details/53302704
串口服务器工作方式
虚拟端口服务器的工作模式分为三种模式:TCP/UDP通信模式、虚拟串口通信模式。
在TCP/UDP通信模式下,串口服务器是成对出现的,一个作为服务器,另一个作为透明端口号,实现数据双向透明传输。
该方法适用于TCP/IP网络连接中两个串口设备之间总线连接的改造。
使用虚拟串口通讯模式时,一台或一台转换器与计算机建立连接,并支持双向透明。
您管理的计算机上的DirectViewPort软件在转换器中,1个DirectViewPort对应多个转换器,n个虚拟串口对应m个转换器(n≤M)。
该方法适用于计算机控制下的485总线或232设备连接。
在网络通信模式下,计算机上的应用程序使用协议来编写通信程序。
我只是在转换器设置中读取支持帐篷的门。
该模式提供了轻松的远程访问和网络通信控制。
正如我所起的,工作模式是Viewportserver服务器提供了多种连接方式,包括TCP/UDP,具体取决于通讯方式,哪些适合和基于网络,哪些适合和网络,取决于通信,哪些是合适的,哪些是基于网络的通信,哪些是合适的,哪些是网络的,根据通信需要。
通过选择合适的方法,可以有效提高ViewPort设备的联网和远程控制能力。
并且串口服务器提供View端口转网络功能,可以转换Rs-232/485/CDXXII并实现Rs232/485/CDXXII串行TCP/IP网络接口。
数据在两个方向上透明传输。
这使得串口设备立即具备了TCP/IP网络接口功能,连接到网络进行数据通信,大大扩展了端口设备的通信距离。
LIN总线有几种信息传输模式?
LIN总线上的信息传输有三种模式:1)主节点向从节点请求数据;2)主节点向从节点发送数据;3)从节点之间发送数据;